A Google Maps babérjaira tör egy új gyalogos navigáció
Ugyan a gyalogos navigáció messze nem új keletű dolog, a Google, a Bing Maps és a Mapquest is kínál ilyen funkciót, de ezek többségében nem jól használható, kevéssé hatékony szolgáltatások. A Lumatic nevű startup ezen szeretne változtatni, s fejlesztéséhez most 800 ezer dolláros kockázati-tőke befektetést kapott.
A Google Maps volt az első igazán jelentős térképszolgáltató, ami a navigációt szétválasztotta az autózástól, ma már tervezhetünk tömegközlekedéshez, kerékpárhoz és gyalogláshoz is útvonalat. Az autós navigációval ellentétben itt viszont még igen kezdetleges megoldásokkal szembesül a felhasználó. Korábban a legnagyobb probléma az autós igényekre szabott térképekkel volt, ami sokszor teljesen lehetetlenné tette az értelmes gyalogos közlekedést - előfordult például, hogy a Google Maps gyalogos tervezője az amerikai felhasználóját felterelte egy autópályára. Mostanra már látni javulást ezen a területen, a kezelőfelületek viszont még mindig nem igazán megfelelőek.
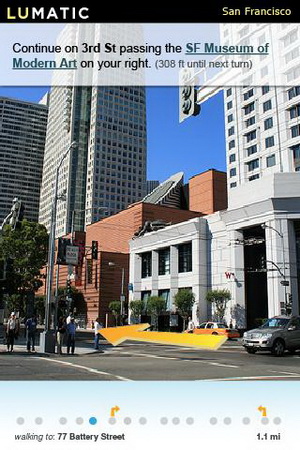
A Lumatic küldetése, hogy ezen a területen alkosson nagyot és létrehozzon egy kifejezetten gyalogosoknak, bicikliseknek és a tömegközlekedést is igénybe vevőknek tervezett navigációt. A fejlesztő már most fel tud mutatni egy androidos alkalmazást, ami egyelőre csak San Francisco utcáin vezeti az autó nélkül közlekedőket. A tech világ fővárosában viszont már úgy adja az itinert, hogy a gyaloglási szempontokat valóban figyelembe veszi és a navigáció mellé fényképekkel és arra helyezett nyilakkal operál.
Meglévő térképre saját algoritmus
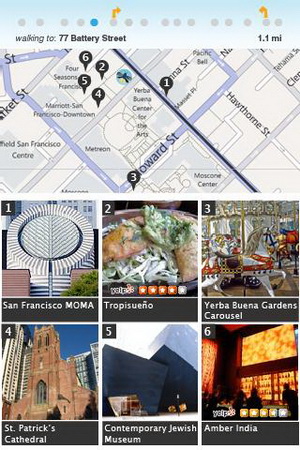
Az app az Open Street Map szolgáltatásra épül, innen származnak a térképek, de a felhasználói élményt nagy részt nem ez, hanem a fényképek, felismerhető épületek és egyéb vizuális segítségek határozzák meg. A Lumatic ezt a megközelítést elég erősnek érzi, hogy támadja vele a Google Maps hídfőállásait, s úgy tűnik nincs egyedül a gondolattal, az ugráshoz szükséges seeding tőkét, 800 ezer dollárt fektetett be együtt a Joi Ito’s, a Neoteny Labs, az 500 Startups és más angyalok. A küzdelem igen kemény lehet, de amennyiben a Lumaticnak sikerül megkapaszkodnia ezen a piacon, akkor biztosan sikeres vállalkozássá nőheti ki magát, ugyanis a gyalogos navigáció nem csupán önmagáért értékes, hanem a helyi kereskedelem, geolokációs szolgáltatások és az ehhez kapcsolódó hirdetési és más bevételek miatt is.
Üzemeltetői meetup és Szabó Balázs standupja a SYSADMINDAY-en! MOST PÉNTEKEN 4 klassz előadással, értékes képzéskuponokkal vár az idei Sysadminday!
A Lumatic egyébként annak ellenére, hogy a back-end oldalon már meglévő térképszolgáltatást használ (egyelőre), a tervezést és az egyéb funkciókat saját gyártású algoritmusra bízza. A hivatalos blogon olvasható információk szerint a fejlesztők kipróbáltak minden létező navigációs szolgáltatást, de a gyalogos tervezéshez mindegyik kevésnek bizonyult valamilyen oknál fogva. Így egy saját, erős algoritmust készített el a cég, az Open Street Map-re pedig azért esett a választás, mert egyrészt szabadon hozzáférhető, másrészt nyers, strukturálatlan adattömegekből áll, amit a Lumatic saját igényei szerint képes rendezni.Azzal kapcsolatban nincs konkrét információ, hogy mikorra készül el egy fejlettebb, San Francisco határain túl is működő termék, de a seeding gyakorlatokat figyelembe véve a következő két éven belül már kell, hogy legyen eredmény.