Sokmagos gépvezérlő: komplex funkciók akár 256 processzormagra
A jövőben a sokmagos vezérlők nem csak a gépgyártásban fognak központi szerepet betölteni, hanem az Ipar 4.0 projektekben is. Annak érdekében, hogy ez utóbbi által felállított követelményeknek eleget lehessen tenni, az intelligens gépekkel és termelőberendezésekkel ellátott okos gyárakban nagy teljesítményű vezérlőkre van szükség. Erre a célra jelent ideális megoldást a Beckhoff C6670 ipari szervere, amelyhez következetes támogatást biztosít a TwinCAT 3.1 automatizálási szoftver, amellyel hatékonyan kiaknázható a kiszolgálóban rejlő roppant nagy számítási teljesítményt.
A sokmagos számítógépek a hagyományos ipari PC-ktől architektúrájukban különböznek. Több processzorral, úgynevezett „csomagokkal” vannak ellátva, amelyek közül mindegyik több processzormaggal rendelkezik. Továbbá eltérések vannak a memória tekintetében is: a NUMA-nak (Non-Uniform Memory Access-nek) nevezett eljárás minden processzor számára egy-egy különálló, egyéni memóriát kínál, miközben a központi egységek egymás memóriájához is hozzáférhetnek viszonylag alacsony késleltetéssel. A Beckhoff C6670 ipari szerverével gyakorlatba alkalmazza az eljárást, ugyanis a kiszolgáló két darab, egyenként 6, 12 vagy akár 18 magos Intel Xeon processzorral, és 64-2048 GB RAM memóriával rendelkezik.
A C6670 ipari szerver roppant nagy számítási teljesítményének előnyeit azonban ténylegesen csak akkor tudjuk kamatoztatni, ha a TwinCAT 3.1 szoftver futtatásával minden egyes processzormag teljesítményét kihasználjuk valamilyen folyamattal. Ezzel lehet a legideálisabb módon leképezni a párhuzamos futtatásra kiválóan alkalmas gép- és folyamatláncolatokat, valamint szétosztani a különböző funkciómodulokat az egyes taskok között.
Egyszerű modularizáció és felhasználóbarát hibakeresés
A TwinCAT automatizálási szoftverben az egyes automatizálási feladatokat modulokban lehet megvalósítani. A PLC- vagy C++ kóddal működő gépi modulokat a TwinCAT-rendszer egyes feladataihoz társítja, amelyek azután ezeket ismétlődő jelleggel végrehajtják a felhasználó által meghatározott letapogatási ütemben. Utána a feladatokat egyszerűen szétosztja a meglévő valós idejű magok között. Az egyes feladatokhoz fontossági sorrendek rendelhetők hozzá, amivel meghatározható lefutásuk sorrendje.
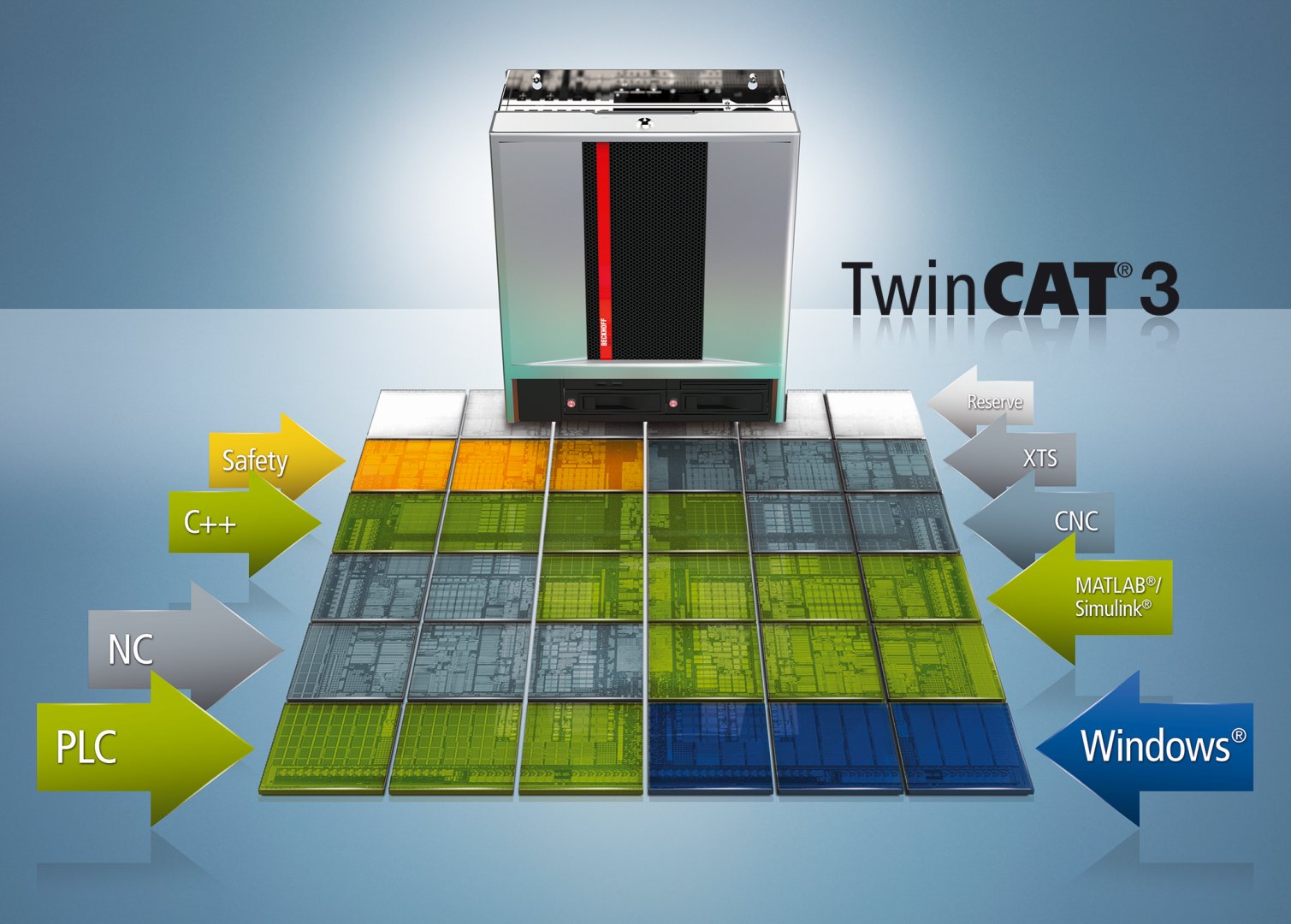
A TwinCAT 3.1 automatizálási szoftverrel ellátott C6670 ipari szerver kiváló platformot teremt a PLC, mozgásvezérlés, robotika, CNC-vezérlés, gépállapot-figyelés vagy energiafelügyelet számára
Ezen felül, a teljes teljesítőképesség kihasználása szempontjából döntő jelentősége van a TwinCAT 3.1 hibakeresésre használt műveleteinek. Ezek segítségével elemezhető ki az egyes magokra eső terhelés. Ezen kívül a magokat kizárólag a TwinCAT-Runtime ellátására is lehet használni. Ezeket elszigetelt magoknak nevezzük, mivel ilyenkor a TwinCAT valós idejű rendszerével párhuzamosan nem fut a Microsoft operációs rendszere. Ilyen módon a Windows-os folyamatokat különösebb ráfordítás nélkül el lehet különíteni a valós idejű folyamatoktól, hogy azok semmilyen esetben ne befolyásolják vezérlést.
A rendszer akár 256 processzormag kiszolgálására is képes
A TwinCAT 3.1 akár 256 processzormag kiszolgálására is képes, így a jövőbeli automatizálási alkalmazások teljes skálájának kiszolgálására alkalmas. Az igényelt számítási teljesítmény függvényében a szükséges magokat célzottan és könnyen hozzá lehet rendelni a valós idejű alkalmazások végrehajtásához.
[A Beckhoff megbízásából készített anyag]